

Конфигурируем APM для самолета
- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Внимание: до того как Вы перейдете к конфигурированию (настройке) APM, убедитесь, что Приемник и передатчик сопряжены и функционируют корректно.
Далее подключите APM2 через USB порт к персональному компьютеру.
Здесь бывает популярная проблема с питанием полетного контроллера - нехватка питания, так, что подключайте USB кабель напрямую в компьютер без usb-хабов. Не используйте кабель свыше 3х метров.
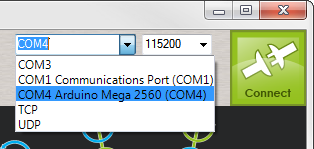
После подключения и запуска Mission planner убедитесь, что COM порт выбран с меткой Arduino Mega 2560, а скорость порта выбрана 115200, далее можно нажимать кнопку Connect для соединения (происходит соединение через протокол MAVLink).
Внимание: Если это первое подключение APM, то после запуска Mission Planner будет выполнена автоматическая процедура подготовки к первому запуску, которая включает в себя форматирование встроенной памяти APM, соответственно сброс всех настроек в первоначальный вид. Данная процедура занимает 1 - 2 минуты, в это время нажатие кнопки Connect будет выдавать ошибку о невозможности соединиться.
Калибровка передатчика
- Подробности
- Категория: 3 - Конфигурация APM самолет

Будет идеально если Вы уже летали на самолете до установки APM2.5 т.е. модель от тримирована. Хотя это достаточно легко сделать во время первого запуска, в ручном (manual mode) режиме.
Далее включаем передатчик и убеждаемся, что аппаратура настроена на режим "самолет" (в случае если ваша модель - самолет, для планера выберите режим планера).
В Mission Planner, во вкладке Configuration, нажимаем “Calibrate Radio”. Передвигая ручки управления видим отклонения до максимального предела. Красные полоски показывают максимальные отклонения (в плюс или минус). Канал Ch 5 используется APM для переключения режимов.
Внимание: если при движении ручками на передатчике Вы не видите результата на экране монитора попробуйте нажать на кнопку “Calibrate Radio” еще раз, а также убедитесь в правильности соединения APM, питания, приемника и mini-usb кабеля, варианты подключения следующие:
- Питание ардупилота через Power module, в 3-й канал входа АРМ(input) подключите приемник, на приемнике так же в 3й канал, JP1 разомкнут
- Питание от USB: в 3-й канал входа АРМ(input) подключите приемник, на приемнике так же (проводок) в 3й канал, JP1 замкнут. Питание на приемник будет поступать от USB, просто включите передатчик.
В “Calibrate Radio” Вы можете включить/выключить реверс, включить функцию элевонов. Не забудьте нажать “Click when done” или Save для сохранения результатов.

Калькулятор пропеллеров (eCalc)
- Подробности
- Категория: Калькулятор пропеллеров
Онлайн калькулятор пропеллеров eCalc известный по таким запросам как: propeller calculator, rc calculator, rc калькулятор - эффективное средство для расчета подбора двигателя с пропеллером для авиа модели. Этот калькулятор позволит Вам не только сохранить жизнь своему двигателю, но и увеличить срок эксплуатации, так же экономить ресурс батареи благодаря возможности выбрать оптимальные параметры для крейсерского режима (оптимальный режим).
Калькулятор только онлайн и расположен по этому адресу ECALC.CH . На главной странице (на английском) предлагается выбор (калькулятора) по типу модели и выбор языка:
- propCalc - калькулятор для пропеллеров самолета
- xcopterCalc - калькулятор для коптеров
- fanCalc - калькулятор импеллерных систем
- heliCalc - калькулятор для вертолетов
С годами ECALC урезал функционал для бесплатных пользователей, поэтому ниже скрины как обойти ограничения ECALC.CH плюс в довесок еще одна ссылка: http://rc-calc.com/ru/copter
Для тех кто понимает в html без слов понятно, описание для тех кто в первый раз. Видим, что AX-4008Q неактивен.

Нажимаем в браузере F12 (например в хроме или firefox) попадаем в "инспектора". Нажимаем на стрелку (на скрине отмечена цифрой 1), затем нажимаем на окно выбора (чего либо, пример с двигателем) по номером два на скрине и видим, что выделилась строка (под цифрой 3).

Нажимаем на эту строку, слева значек - развернуть. Видим в списке нужный двигатель видим, что стоит признак disable. Переделываем аналогично другим строкам, которые работают.

Пример исправленной строки.

С годами ECALC урезал функционал для бесплатных пользователей, поэтому в довесок еще одна ссылка: http://rc-calc.com/ru/copter
Питание платы и модулей APM2
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
Питание от одного источника
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
|
Питание от BEC на выходах (output) |
5.37V +-0.5 | 6V | JP1 есть |
Питание от двух источников
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
| Питание от BEC на выходах (output) | 5.00V +-0.5 | 6V | JP1 нет |
| Питание на входы (input) | 5.00V +-0.25 | 5.5V | JP1 нет |
Питание от модуля питания
Размыкаем JP1 и подключаем модуль питания (6ти пиновый провод)
К сведению: Если перемычки JP1 нет (разомкнут), требуется раздельное питание на входе и выходе APM, т.е. на выходах обычно на 3м ставится регулятор с UBEC который дает питание сервомеханизмам, а на входе BEC будет питать саму плату.
Внимание: Не превышайте максимальное напряжение!!! Превышение влечет повреждение APM.
Внимание: Подключая USB кабель к APM с подключенной батареей питания к BEC, регулятору с UBEC опасайтесь всплеска/увеличения напряжения, которое сможет привысить максимальный допустимый предел и вызвать повреждения платы Просто отключите любое питание от APM при подключении к USB.
Подсказка 1: если используете питание от Power Module, JP1 оставляйте разомкнутым воизбежании превышения максимального напряжения питания платы при подсоединении USB кабеля
Подсказка: APM2 с подключенным приемником, если замкнуть JP1, отключить любое питание от платы (модуль питания, BEC) и подключить с помощью USB провода к ПК, то работать будет и приемник. Т.е. включив пульт передатчика Вы сможете видеть движение стиков в Mission planner в разделе Radio calibtarion.
ВНИМАНИЕ: Читайте внимательнее, задавайте вопросы с комментариях. ПОМНИТЕ что плата ардупилота ВАША и Вы ответственны за то, чтоб ее не сжечь.
Схема: пример включения модулей APM2
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2

Пример включения модулей APM на популярном самолете Bixler (2 серво на элеронах через гидру Y, 1 серво на стабилизатор и 1 на руль поворота)
Установка APM2 на самолет
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
Очень важно установить плата APM2 в правильном направлении, в направлении движения самолета. Как на плате так и на пластиковом копрусе имеется отметка со стрелкой (направления движения) и надпись Forward (вперед). Входы (input) куда подключается приемник будут направлены по направлению движения, а выходы на сервомеханизмы (output) будут смотреть назад. Так же важно, чтоб плата небыла перевернута вверх ногами, т.е. радиодетали печатной платы должны смотреть вверх.

APM не должен болтаться или свободно "гулять" по корпусу во время полета. Постарайтесь располагать устройство в горизонтальной плоскости, которая соответствует горизонтальному полету самолета, т.е. APM должен быть максимально в той же плоскости что и хорда летательного аппарата. В идеале контроллер располагается в точке центра тяжести, это место наименьшей вибрации. Крепить лучше всего на толстый 2х сторонний скотч (снижает вибрацию) на ровную платформу.
Как и где крепить модуль GPS APM ardupilot
- Важно чтоб квадратная антенна была направленна вверх
- Желательно GPS модуль располагать как можно дальше от передающих устройств таких как телеметрия, видео передатчик, антенна модуля радио модема APM
- Идеально если GPS модуль будет находиться вне корпуса и в верхнем направлении не будет ничего, что могло б загораживать сигнал.
Выходы APM (output) на серво и регуляторы
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
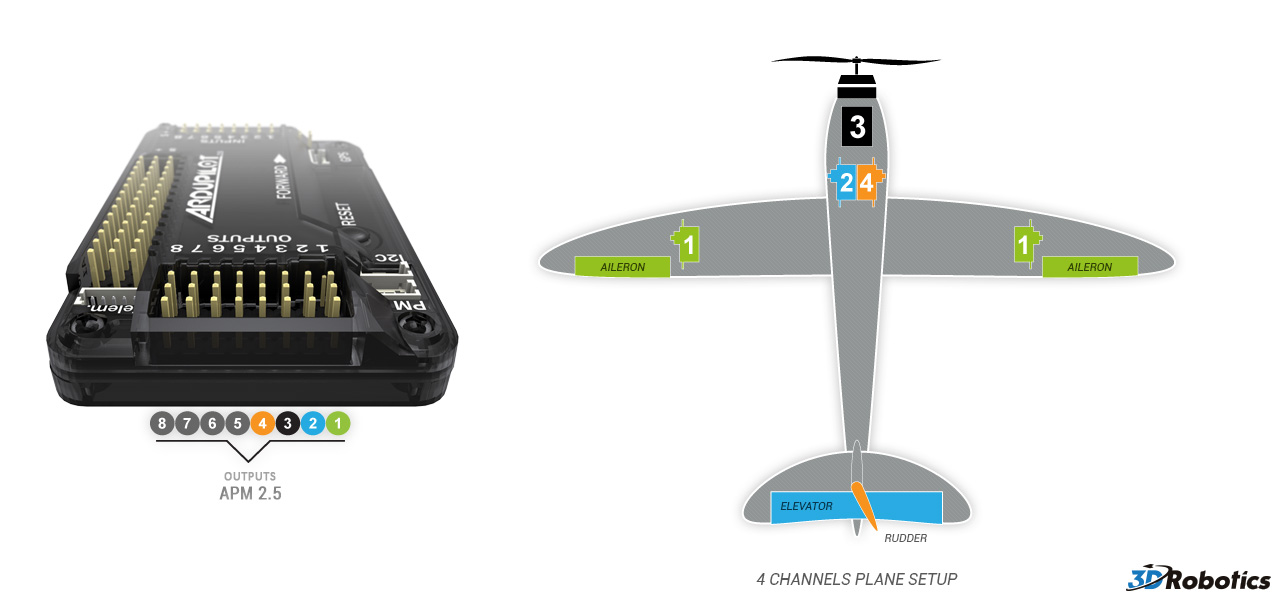
Выше классическая схема самолета. 3 серво и один регулятор.
В выход 1 подключаются две серво элерон (подключаются параллельно кабелем Y или по другому называют "гидра");
В выход 2 подключается серво руля высоты (стабилизатор);
В выход 3 подключается регулятор оборотов;
В выход 4 подключается сервомеханизм руля поворота.
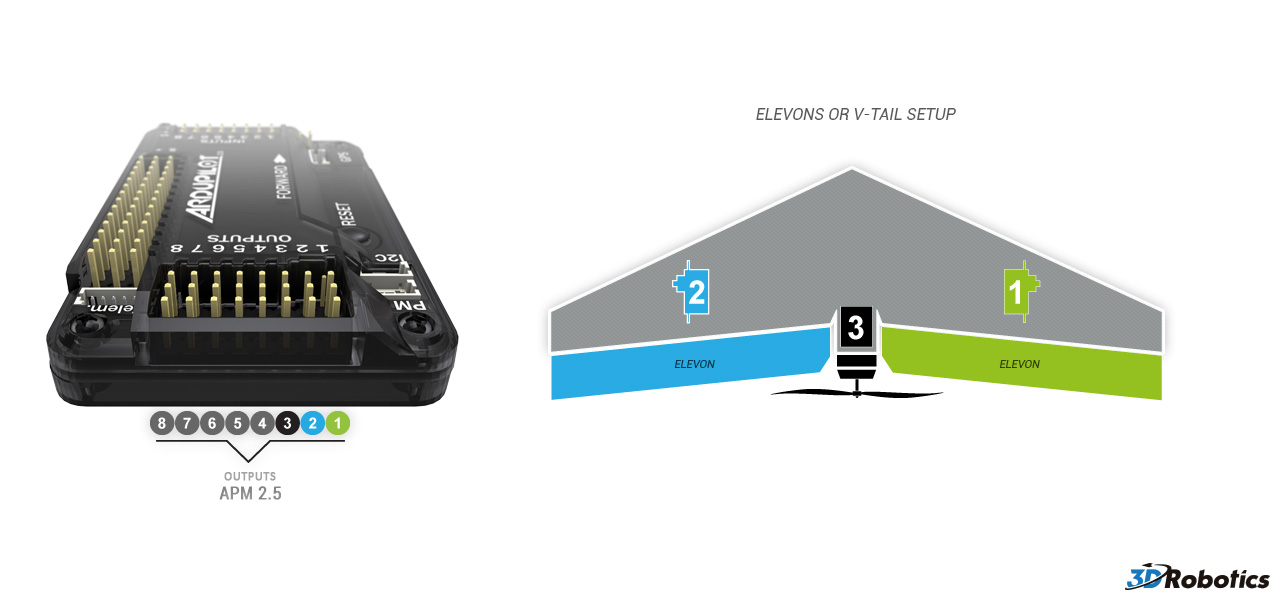
Выше схема подключения "летающего крыла" с элевонами (выполняющие функцию элерон и руля высоты):
1 выход: Правый элевон
2 выход: Левый элевон
3 выход: Тяга
Входы (inputs) APM
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
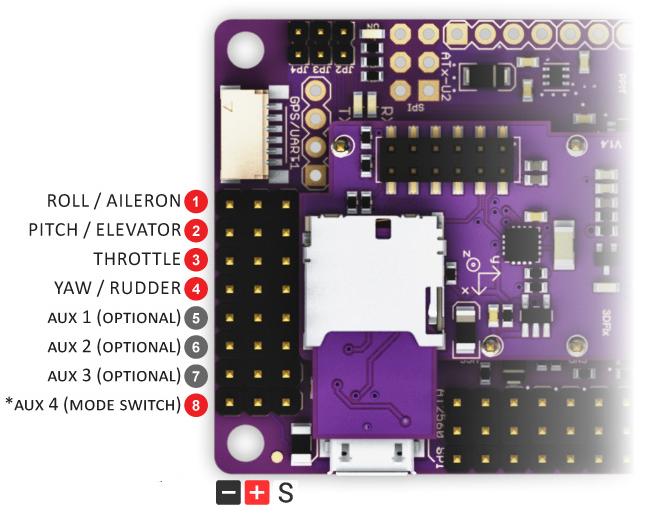
Подключать RC приемник необходимо мама-мама проводами, в разъемы соответствующие своим серво механизмам - например выход элерон с RC приемника подсоединяется в APM Input1 элероны, аналогично остальные.
Вход 8 APM2 используется для переключения режимов (Mode Switch) и подключается к любому свободному выходу приемника, например 5. Удобно 5й канал приемника настраивают на 3х позиционный переключатель Вашего передатчика.
Подключение серво механизмов и регулятора скорости
- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
- Входы APM2 (inputs)
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
Самые сложные функции, которые может выполнять APM это превратить Ваш самолет в без пилотный летательный аппарат (БПЛА). Принцип работы прост - подключенный между приемником и серво механизмами/регулятором скорости APM берет на себя полное управление (например полет по точкам, возврат домой, описывать круг над заданной точкой) или частично вносит корректировку в управление (режимы стабилилизации) руководствуясь встроенным 3х осевым гироскопом, акселерометром и высокоточным барометром.
Технически подключение происходит трех жильным проводом мама-мама. Приемник подключается во входы платы INPUTS. В выходы (OUTPUTS) подключаются серво механизмы и регулятор скорости (схема классического электро самолета).
Что требуется:
- RC приемник, рекомендуется минимум 5и канальный (элероны, руль высоты, тяга, руль поворота, канал переключения режимов полета), но самый минимум будет 4х канальный для самолета схемой "летающее крыло" (это 2 серво, 3й регулятор и 4й канал на переключатель режимов);
- 3х жильные кабеля мама-мама (как серво удлинитель только 2 мамы с обоих сторон);

- Для APM2.5 Вы можете использовать питание как от APM Power Module, так и от регулятора скорости (обычно они со встроенным BEC дающий +5 вольт). Но в случае питания от Power модуля (в этом случае JP1 разомкнут) Вам всеравно понадобится регулятор со встроенным (или отдельным BEC) для подачи напряжения питания на серво механизмы;
Внимание: APM 2 можно питать от USB кабеля, но напряжение на выходы поступать не будет (питание на серво, регуляторы). Чтобы увидеть движение серв, при сборке на "на тестовом стенде" для дальнейшей конфигурации через USB, необходимо подключить питание через регулятор оборотов (3й output для самолетной прошивки, JP1 замкнут) или через Power module (JP1 разомкнут).
Гама Казино
© Copyright 2022