

Легенда игр. Heroes of Might and Magic
- Подробности
- Категория: Компьютерные игры
В 1999 году компания NewWorld выпустила мега-хит однопользовательских стратегий для персональных компьютеров Heroes of Might and Magic , под издательством 3DO. Локализатором игры унас выступила компания BUKA. По прошествии более 10 лет было принято решение переиздать всеми любимую стратегию в HD качестве одной из версий игры, а именно «Возрождение Эрафии». Эта часть франшизы была выкуплена французской компанией Ubisoft .И вот наконец то игра вышла в све – она доступна не только для владельцев персональных компьютеров, а и для пользователей телефонов с операционной системой Android и для планшетов.
Главным вопросом является – а стоило ли переиздавать то, что и так популярно? С первых секунд при входе в меню игры бросается изменение графики, конечно же разница в новых технологиях дает о себе знать. В целом само меню не претерпело никаких изменений. Лицензионная версия игры содержит в себе не так у ж и много карт, без возможности редактирования или регенерации случайных. Как и в оригинальной версии размеры карт: S, M, L,и XL. Количество карт для размера S – 8 штук, L – 11 штук, XL -6 штук и наибольшее разнообразие представляю карты размера M. Это связано в первую очередь с тем что все карты в HD качестве перерисованы в ручную. Но игра имеет редактор карт, так что любой игрок при желании может сам составить любой мир для прохождения. Без изменений осталась настройка выбора сложности и типов замков. Исчез из карт городов замок Сопряжение, поиграть за огненных фениксов в этой версии не получится. Оказались также переименованы многие герои. В игре стал доступен режим мультиплеер без использования дополнительных программ и приложений.
В начале игры можно заменить, что намного ярче стала прорисовка карт, текстуры приобрели четкость и гладкость. Создается впечатление рисованной картинки карандашом. Изменились названия некоторых артефактов. Очень претерпел изменения шрифт, добавили тени. Музыкальное сопровождение осталось оригинальным. Больше никаких изменений в игре не произошло. Что порадовало и в тот же момент огорчило любителей игры. В итоге компания Ubisoft выпустила оригинальный ремейк игры «Герои Меча и Магии – Эпоха Эрафии» в HD качестве. По версии онлайн голосования от локализатора игровых проектов Mail.Ru игра получила первое место в номинации «Лучшим ремейк года». В ближайшее время игру ожидают дополнения в виде мини патчей.
Как запускать радиоуправляемый вертолет?
- Подробности
- Категория: Первые шаги RC
Радиоуправляемые вертолеты условно классифицируются на игровые электровертолеты и спортивные модели с двигателями внутреннего сгорания. Освоение техники управления радиоуправляемыми игрушками обычно начинают с трех или четырехканальных электровертолетов, предназначенных для домашнего использования.
Попытка запустить модель без предварительного обучения технике взлета и посадки, движения вперед/назад, зависания в воздухе и маневрирования в полете часто приводит к поломкам уже после первого неудачного приземления.
Только когда вы добьетесь уверенного запуска и управления простой моделью, можно смело покупать вертолет с камерой, усовершенствованную модель современных радиоуправляемых игрушек.
Управление радиоуправляемым вертолетом: тренировка
Обучение технике управления радиоуправляемым игрушками необходимо проводить в достаточно просторных помещениях, чтобы радиус свободного полета модели составлял примерно 2 м. Перед запуском необходимо поставить игрушку по центру помещения в достаточном удалении от других предметов, которые могут создавать препятствия во время полета.
1. Взлет/посадка. Для обучения технике взлета и посадки осваивают движения левым рычагом на пульте управления. При взлете важно научиться понимать зависимость между скоростью вращения винтов и перемещением вертолета в вертикальной плоскости. Скорость оборотов винтов необходимо прибавлять плавно, но решительно, до тех пор, пока модель не поднимется на высоту примерно 1 м. Для уменьшения высоты полета и выхода на посадку движения рычагом управления осуществляются тоже плавно, но уже в обратном направлении.
2. Зависание в воздухе. При наборе высоты в 1 метр, скорость вращения винтов сначала немного сбавляется, затем регулируется для поддержания нужного уровня высоты. Стабилизация положения вертолета на заданной высоте поддерживается включением специального регулятора на пульте управления.
3. Перемещение вперед/назад. Управление движением вперед/назад осуществляется с помощью перемещения правого рычага на пульте управления по направлению от себя и к себе. Перед началом полета желательно заранее определить конечную точку движения игрушки. После того, как модель поднимется на достаточную высоту (примерно 1 м), начинаем плавно перемещать правый рычаг на пульте по направлению вперед, при этом стараемся сохранять высоту полета на одном уровне. Достигнув выбранной точки полета, вертолет фиксируют в воздухе, после чего выполняют движение в первоначальную точку старта, но уже задним ходом. Совершается посадка.
4. Перемещение вправо/влево. Игрушка устанавливается по центру помещения, определяется конечная точка полета. Набираем заданную высоту в 1 м и руководим движением модели по направлению вперед к выбранной цели. Одновременно управляем вторым, левым рычагом для сохранения одинаковой высоты полета. Достигнув конечной точки полета, фиксируем вертолет в воздухе и разворачиваем его на 180? (движение правым рычагом в сторону).

APM 2.6 Установка "Вверх ногами" и других положениях
- Подробности
- Категория: 4 - Полезные настройки APM
Возможно не все знают что, начиная с APM 2.5 можно устанавливать "вверх ногами", точнее устанавливать можно любой стороной, это очень удобно в условиях ограниченного пространства. Параметр отвечающий за положение (ориентированность) APM в пространстве AHRS_ORIENTATION.
Чтобы установить APM 2.6 вверх ногами:
В Mission Planner - Config/Tuning - Full Parameter List - Искать (find), ищем AHRS_ORIENTATION и устанавливаем значение AHRS_ORIENTATION=8
Одна из популярнах на сегодняшний день моделей самолета для FPV это Bixler (Skywalker). Легко собирается, легок в управлении, легко поддается самому сложному ремонту. Обладая "скошенным", полукруглым дном фюзеляжа установка APM весьма неудобна. Большая часть свободного места фюзеляжа как правило уходит под аккумуляторы (основной и для видео передатчика). Особенно удобно устанавливать APM на Бикслер вверх ногами, под крышку "кабины".

Расчет центра тяжести - устойчивость модели (верхнеплан)
- Подробности
- Категория: Первые шаги RC
Центр тяжести (Ц.Т), Центр масс самолёта (на английском Centre of mass, COG) это "воображаемая" точка в которой пересекаются 3 оси вращения самолёта (X,Y,Z).  Центр тяжести может менять своё местоположение при изменении загрузки самолёта (например смена аккумулятора, установка камеры на нос самолета и т.д.). Когда центр тяжести смещается за максимально допустимые пределы, для данной модели, самолёт теряет свою былую управляемость, вплоть до полной потери управления.
Центр тяжести может менять своё местоположение при изменении загрузки самолёта (например смена аккумулятора, установка камеры на нос самолета и т.д.). Когда центр тяжести смещается за максимально допустимые пределы, для данной модели, самолёт теряет свою былую управляемость, вплоть до полной потери управления.
Перед тем как приступить к первому запуску авиамодели необходимо "вывести" центр тяжести в нужное место, обычно этот процесс называют - центровка модели. Понятие "нужное место" весьма индивидуально, как для пилота, так и для типа самолета (пилотажная или планер).
Если Вы купили готовый к запуску самолет, то в инструкции найдете примечание, что центр тяжести находится, например, в 36 миллиметрах от передней кромки. Или в 60 мм от задней кромки (The center of gravity is measured 60 mm back from the leading edge of the main wing). Или от носа самолета 384 мм.
Отмеряете нужное расстояние и маркером отмечаете(точкой) Ваш центр тяжести. Каждый раз перед запуском, "снарядив" и включив самолет, убеждаетесь, что центр тяжести на своем месте.
Тут каждый сантиметр смещения имеет большое значение.
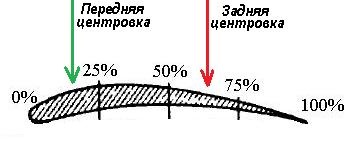
"Центровка модели" измеряется в процентах от средней аэродинамической хорды (САХ). Кратко САХ (например для прямоугольного крыла) - это расстояние от передней кромки крыла, до задней. Принято считать 10% - 22% передней центровкой, 20% - 25% задней центровкой
Цель центровки тренера - это разместить центр тяжести готового самолета на расстоянии 10% - 22% от передней кромки крыла. Пример 15%: если ширина прямоугольного крыла 200 мм то 15% будет составлять 30 мм от передней кромки крыла.
Как находить центр тяжести у Простого прямоугольного крыла. Берем левую (или правую) половину крыла и делим ее пополам, прочерчиваем линию (на крыле) вдоль фюзеляжа самолета. Такое же действие проделываем и с второй половиной крыла. Вот эта линия называется средней аэродинамической хордой. Отмерив от передней кромки линий САХ (ранее проведенных) нужный Вам процент расстояния, соединяем отмеренные точки горизонтальной линией проходящей через центр крыла. Там, где центр крыла пересекла горизонтальная линия и будет располагаться нужный центр тяжести.
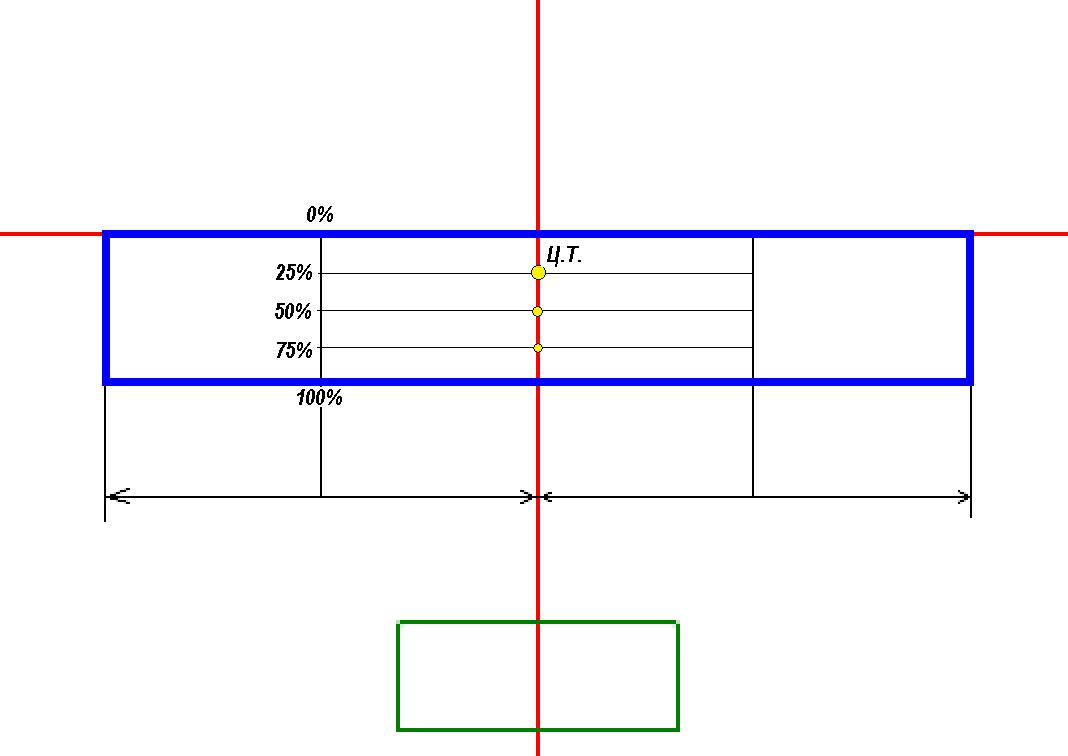
Там, где центр крыла пересекла горизонтальная линия и будет располагаться нужный центр тяжести. Устанавливаем крыло на модель, загружаем самолет, как перед запуском, и "двигаем" центр тяжести всеми возможными методами. Без увеличения веса модели сдвинуть Ц.Т. удобно самым тяжелым элементом модели - аккумулятором. Аккумулятор не должен "гулять" по модели, поэтому так популярно крепление для батарей - липучка, как на обуви с клеящейся поверхностью с другой стороны. В случае не возможности центровки только одной батареей (или увеличением батареи), прибегают к использованию грузов-противовесов, но утяжеление самолета это другая тема.
Центровка сильно влияет на управляемость самолетом в воздухе. Различают 2 вида центровки: Передняя центровка, Задняя центровка.

Передняя центровка - обеспечивает самолету хорошую продольную/колебательную (колебания вверх-вниз) устойчивость (см. картинку выше). Уменьшится маневренность (фигура петля - будет иметь больший радиус), устойчивость обеспечится даже при движении против порывов ветра, но планировать модель будет хуже. Нос будет стремиться вниз, потребуется корректировка полета рулем высоты. Сбросив обороты, перед посадкой, нос еще сильнее потянет к земле и со снижением скорости даже максимальное отклонение руля высоты не сможет выровнять самолет в горизонт.
Задняя центровка - обеспечивает самолету продольную/колебательную (колебания вверх-вниз) неустойчивость (см. картинку выше), которая необходима для маневренности. По оси Z (фигура "петля") модель сможет развернуться на 360 градусов практически с нулевым радиусом, просто "кувыркнувшись" относительно центра тяжести.  В таких моделях площадь отклоняемых поверхностей стабилизатора (руль высоты) и руля поворота значительно выше чем у тренеров, планеров. Так же широко используется функция "Расходы" на пульте управления. При задней центровке самолет может задирать нос, выходя на кабрирование (см. картинку первый фрагмент) терять скорость, падать вниз. Набрав скорость при падении, снова задирать нос.
В таких моделях площадь отклоняемых поверхностей стабилизатора (руль высоты) и руля поворота значительно выше чем у тренеров, планеров. Так же широко используется функция "Расходы" на пульте управления. При задней центровке самолет может задирать нос, выходя на кабрирование (см. картинку первый фрагмент) терять скорость, падать вниз. Набрав скорость при падении, снова задирать нос.
Центровка модели - это процесс выбора золотой середины между неуправляемой устойчивостью и между неустойчивостью обеспечивающая маневренность.

Включить лог Акселерометра и гироскопа
- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Эти два лога самые интересные - лог акселерометра и гироскопа - по умолчанию они выключены. (Интересные - скорей всего клёвые т.к.позволяют выяснить перегрузки действующие на модель во время полета и при падении.)
Чтоб включить логирование акселерометра и гироскопа делаем следующее:
- подключаем APM в компьютер USB кабелем (если он уже подключен отключаем переподключаем),
- в Mission Planner нажимает кнопку “Terminal” в верхней части,
- далее нужно нажать Enter 3-раза : это переведет в CLI mode,
- набираем на клавиатуре logs и нажимаем кнопку enter,
- далее пишем: “enable imu” и нажимаем кнопку enter,
- логирование акселерометра и гироскопа включено,
- переподключаем USB кабель (отключить кабель подождать 5 сек и включить снова)
Внимание: запись лога акселерометра и гироскопа потребляет большое количество ресурсов процессора, т.е. при включенном логировании вся система будет работать максимально нагруженной - это увеличение потребления электропитания, а так же в некоторых случаях может вызвать кратковременные зависания системы. Т.е. неиспользуйте запись этих логов и полетные режимы (стабилизация, возврат домой и т.д.) одновременно.
Калибровка акселерометра
- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Если плата ардупилота поддерживает опцию EKF Inertial Navigation, то необходимо ее включить AHRS_EKF_USE = 1, а затем произвести калибровку акселерометра.
Для калибровки акселерометра заходим INITIAL SETUP -> Mandatory Hardware -> Accel Calibration. После нажатия кнопки Calibrate Accel Вас попросят самолет (с APM) положить на правую сторону, на левую сторону, носом вниз, носом вверх и назад (положить в исходное положение), после каждой смены положения нужно нажимать любую кнопку на клавиатуре. Очень важно перед тем как нажать кнопку (подтверждение что арду пилот в нужном положении) самолет (плата APM) должен быть неподвижен (даже руки к столу не прикасать, а на клавиатуру нежно, аккуратно нажимать). Имейте ввиду, что крутить собранный (особенно если большой) самолет не очень то удобно, поэтому калибровку можно произвести только с платой ардупилота.
Откалибровав APM2 кнопкой Calibrate Accel не проводите облегчённую функцию Calibrate Level (кнопка ниже) т.к. это затрет в памяти все предыдущие результаты калибровки.

Конфигурация дополнительных модулей APM2
- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Популярным модулем считается модуль GPS со встроенным компасом (в случае отсутствия компаса на основной плате, китайский аналог). Менее популярными являются датчик скорости воздушного потока (работает по принципу трубки пито) и сонар. Сонар в большей части используется на ардукоптерах при конструировании автономных беспилотных летательных аппаратов. Позволяет не сталкиваться с препядствиями при движении по заданному ранее маршруту.

Как только Вы подключили компас и поставили галочку разделе "Hardware Options", напротив него, необходимое произвести калибровку, которую можно сделать следующими способами:
- Первый способ - это ничего не делать. После подключения питания (в поле перед запуском) GPS модуль соединится со спутниками, но данные магнитного компаса будут автоматически откалиброваны только в полете, путем сравнения данным с электронного компаса и данных с GPS. Плюс в этом способе - ничего не нужно делать (только запастись терпением). Минус в том, что каждый первый запуск требует много времени.
- Второй способ - калибровка в ручную в Mission Planner (фото выше).
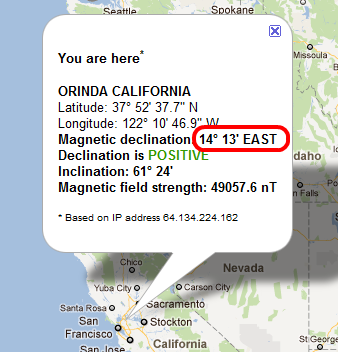 Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении.
Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении. - Третий способ самый необычный - это калибровка компаса при помощи полетного лог файла последнего полета (или записанного ранее) с установленными GPS и компас модулем (без какой либо калибровки). Функция отмечена как Log Calibration, воспроизводит полет из log (.tlog) и система сопоставляя анализирует записанные данные GPS и гироскопа (IMU) осуществляет требуемые корректировки. Это самый удобный способ калибровки компаса. Минус в том, что если загрузить .tlog , где полет фактически не совершался (например только вращение корпуса модели), то калибровка будет полностью сбита.
Настройка режимов полета ардупилота
- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Настройки режимов полета производится в разделе Configuration -> Fight Modes
- Одна из удобных функций ардупилота - это возможность переключения режимов полета в процессе самого полета. Представьте, что с земли Вы можете включить/выключить режим стабилизации, включить ркжим "Возврат домой".
- Переключать режимы полета APM возможно не только через передатчик, но и через компьютер в случае если у Вас установлен модуль радио модема (xbee)
- Переключение через передатчик осуществляется путем настройки переключателя (например 3х позиционного или тумблера шасси и д.р.) на канал 5. 5й канал передатчика подключается в 8й вход ардупилота т.к. для режима "Самолет" именно 8й используется для данных о режиме полета. The goal is to send a PWM signal — for each desired flight mode — that falls somewhere near the middle of one of the flight mode ranges, shown on the right.
- Настроив передатчик на нужный переключатель (тумблер) выбранный режим будет отображаться зеленым выделением. На каждый режим полета (Fight Mode 1 - 6) можно выбрать требуемую функцию из выпадающего меню. Выбрав функции полета под каждый режим не забудьте сохранить нажав зеленую кнопку Save Modes.

Гама Казино
© Copyright 2022