- Подробности
- Категория: 3 - Конфигурация APM самолет
- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Эти два лога самые интересные - лог акселерометра и гироскопа - по умолчанию они выключены. (Интересные - скорей всего клёвые т.к.позволяют выяснить перегрузки действующие на модель во время полета и при падении.)
Чтоб включить логирование акселерометра и гироскопа делаем следующее:
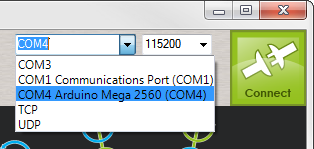
- подключаем APM в компьютер USB кабелем (если он уже подключен отключаем переподключаем),
- в Mission Planner нажимает кнопку “Terminal” в верхней части,
- далее нужно нажать Enter 3-раза : это переведет в CLI mode,
- набираем на клавиатуре logs и нажимаем кнопку enter,
- далее пишем: “enable imu” и нажимаем кнопку enter,
- логирование акселерометра и гироскопа включено,
- переподключаем USB кабель (отключить кабель подождать 5 сек и включить снова)
Внимание: запись лога акселерометра и гироскопа потребляет большое количество ресурсов процессора, т.е. при включенном логировании вся система будет работать максимально нагруженной - это увеличение потребления электропитания, а так же в некоторых случаях может вызвать кратковременные зависания системы. Т.е. неиспользуйте запись этих логов и полетные режимы (стабилизация, возврат домой и т.д.) одновременно.


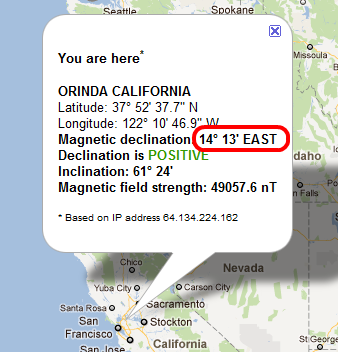 Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении.
Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении.