- Подробности
- Категория: 2 - Подключение серво, регуляторов
- Подключение серво механизмов и регулятора скорости
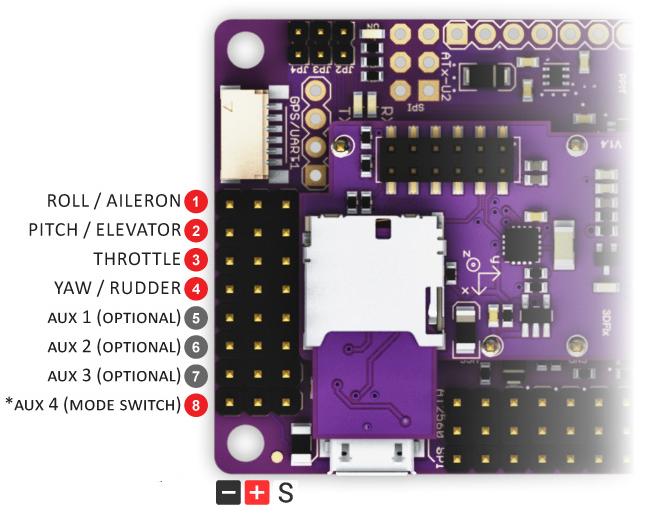
- Входы APM2 (inputs)
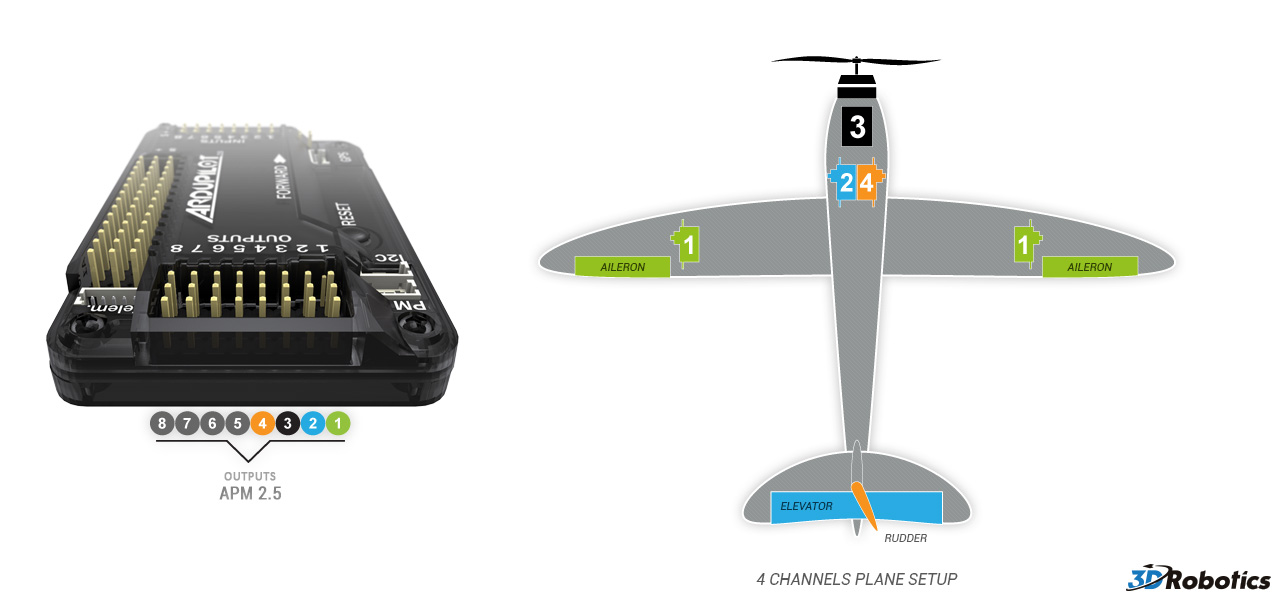
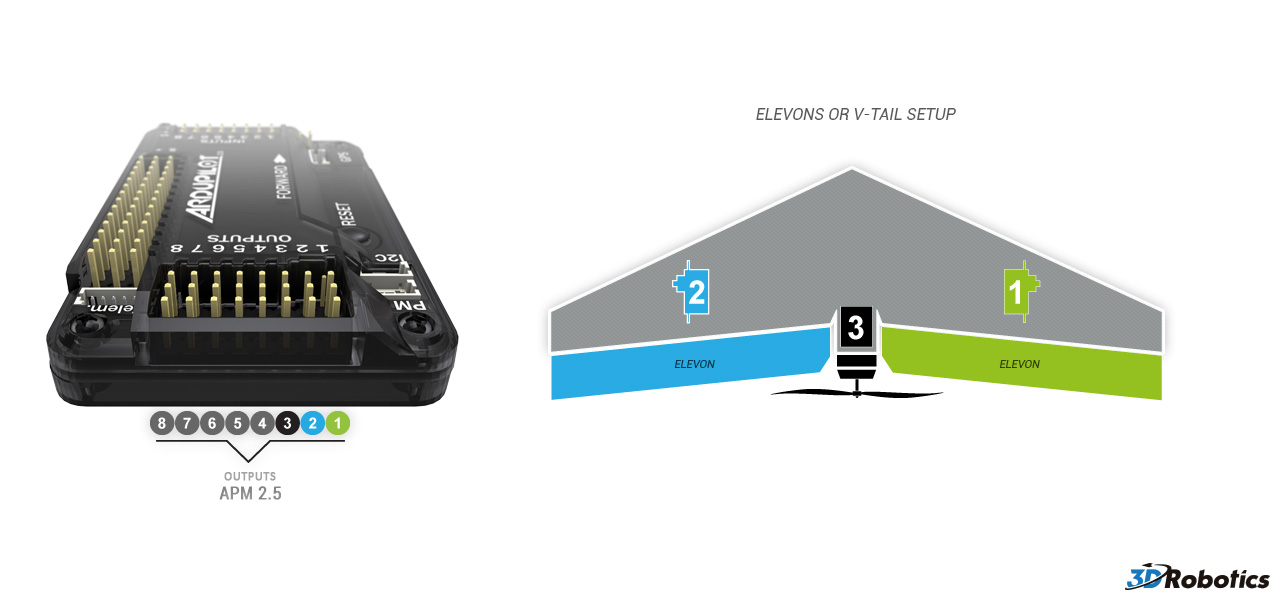
- Выходы APM (output)
- Установка APM2 на самолет
- Схема: пример включения модулей APM2
- Питание платы и модулей APM2
Питание от одного источника
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
|
Питание от BEC на выходах (output) |
5.37V +-0.5 | 6V | JP1 есть |
Питание от двух источников
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
| Питание от BEC на выходах (output) | 5.00V +-0.5 | 6V | JP1 нет |
| Питание на входы (input) | 5.00V +-0.25 | 5.5V | JP1 нет |
Питание от модуля питания
Размыкаем JP1 и подключаем модуль питания (6ти пиновый провод)
К сведению: Если перемычки JP1 нет (разомкнут), требуется раздельное питание на входе и выходе APM, т.е. на выходах обычно на 3м ставится регулятор с UBEC который дает питание сервомеханизмам, а на входе BEC будет питать саму плату.
Внимание: Не превышайте максимальное напряжение!!! Превышение влечет повреждение APM.
Внимание: Подключая USB кабель к APM с подключенной батареей питания к BEC, регулятору с UBEC опасайтесь всплеска/увеличения напряжения, которое сможет привысить максимальный допустимый предел и вызвать повреждения платы Просто отключите любое питание от APM при подключении к USB.
Подсказка 1: если используете питание от Power Module, JP1 оставляйте разомкнутым воизбежании превышения максимального напряжения питания платы при подсоединении USB кабеля
Подсказка: APM2 с подключенным приемником, если замкнуть JP1, отключить любое питание от платы (модуль питания, BEC) и подключить с помощью USB провода к ПК, то работать будет и приемник. Т.е. включив пульт передатчика Вы сможете видеть движение стиков в Mission planner в разделе Radio calibtarion.
ВНИМАНИЕ: Читайте внимательнее, задавайте вопросы с комментариях. ПОМНИТЕ что плата ардупилота ВАША и Вы ответственны за то, чтоб ее не сжечь.