

- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Популярным модулем считается модуль GPS со встроенным компасом (в случае отсутствия компаса на основной плате, китайский аналог). Менее популярными являются датчик скорости воздушного потока (работает по принципу трубки пито) и сонар. Сонар в большей части используется на ардукоптерах при конструировании автономных беспилотных летательных аппаратов. Позволяет не сталкиваться с препядствиями при движении по заданному ранее маршруту.

Как только Вы подключили компас и поставили галочку разделе "Hardware Options", напротив него, необходимое произвести калибровку, которую можно сделать следующими способами:
- Первый способ - это ничего не делать. После подключения питания (в поле перед запуском) GPS модуль соединится со спутниками, но данные магнитного компаса будут автоматически откалиброваны только в полете, путем сравнения данным с электронного компаса и данных с GPS. Плюс в этом способе - ничего не нужно делать (только запастись терпением). Минус в том, что каждый первый запуск требует много времени.
- Второй способ - калибровка в ручную в Mission Planner (фото выше).
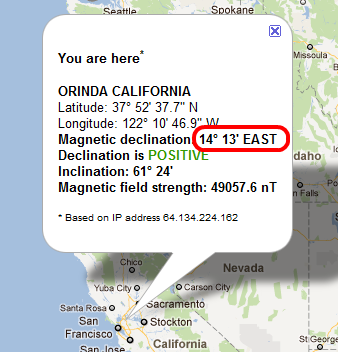 Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении.
Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении. - Третий способ самый необычный - это калибровка компаса при помощи полетного лог файла последнего полета (или записанного ранее) с установленными GPS и компас модулем (без какой либо калибровки). Функция отмечена как Log Calibration, воспроизводит полет из log (.tlog) и система сопоставляя анализирует записанные данные GPS и гироскопа (IMU) осуществляет требуемые корректировки. Это самый удобный способ калибровки компаса. Минус в том, что если загрузить .tlog , где полет фактически не совершался (например только вращение корпуса модели), то калибровка будет полностью сбита.