

- Калибровка передатчика
- Настройка режимов полета ардупилота
- Конфигурация дополнительных модулей APM2
- Калибровка акселерометра
- Включить лог Акселерометра и гироскопа
Внимание: до того как Вы перейдете к конфигурированию (настройке) APM, убедитесь, что Приемник и передатчик сопряжены и функционируют корректно.
Далее подключите APM2 через USB порт к персональному компьютеру.
Здесь бывает популярная проблема с питанием полетного контроллера - нехватка питания, так, что подключайте USB кабель напрямую в компьютер без usb-хабов. Не используйте кабель свыше 3х метров.
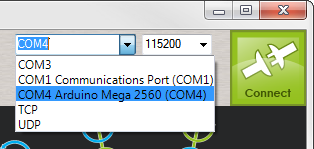
После подключения и запуска Mission planner убедитесь, что COM порт выбран с меткой Arduino Mega 2560, а скорость порта выбрана 115200, далее можно нажимать кнопку Connect для соединения (происходит соединение через протокол MAVLink).
Внимание: Если это первое подключение APM, то после запуска Mission Planner будет выполнена автоматическая процедура подготовки к первому запуску, которая включает в себя форматирование встроенной памяти APM, соответственно сброс всех настроек в первоначальный вид. Данная процедура занимает 1 - 2 минуты, в это время нажатие кнопки Connect будет выдавать ошибку о невозможности соединиться.