Эти два лога самые интересные - лог акселерометра и гироскопа - по умолчанию они выключены. (Интересные - скорей всего клёвые т.к.позволяют выяснить перегрузки действующие на модель во время полета и при падении.)
Чтоб включить логирование акселерометра и гироскопа делаем следующее:
- подключаем APM в компьютер USB кабелем (если он уже подключен отключаем переподключаем),
- в Mission Planner нажимает кнопку “Terminal” в верхней части,
- далее нужно нажать Enter 3-раза : это переведет в CLI mode,
- набираем на клавиатуре logs и нажимаем кнопку enter,
- далее пишем: “enable imu” и нажимаем кнопку enter,
- логирование акселерометра и гироскопа включено,
- переподключаем USB кабель (отключить кабель подождать 5 сек и включить снова)
Внимание: запись лога акселерометра и гироскопа потребляет большое количество ресурсов процессора, т.е. при включенном логировании вся система будет работать максимально нагруженной - это увеличение потребления электропитания, а так же в некоторых случаях может вызвать кратковременные зависания системы. Т.е. неиспользуйте запись этих логов и полетные режимы (стабилизация, возврат домой и т.д.) одновременно.
]]>Если плата ардупилота поддерживает опцию EKF Inertial Navigation, то необходимо ее включить AHRS_EKF_USE = 1, а затем произвести калибровку акселерометра.
Для калибровки акселерометра заходим INITIAL SETUP -> Mandatory Hardware -> Accel Calibration. После нажатия кнопки Calibrate Accel Вас попросят самолет (с APM) положить на правую сторону, на левую сторону, носом вниз, носом вверх и назад (положить в исходное положение), после каждой смены положения нужно нажимать любую кнопку на клавиатуре. Очень важно перед тем как нажать кнопку (подтверждение что арду пилот в нужном положении) самолет (плата APM) должен быть неподвижен (даже руки к столу не прикасать, а на клавиатуру нежно, аккуратно нажимать). Имейте ввиду, что крутить собранный (особенно если большой) самолет не очень то удобно, поэтому калибровку можно произвести только с платой ардупилота.
Откалибровав APM2 кнопкой Calibrate Accel не проводите облегчённую функцию Calibrate Level (кнопка ниже) т.к. это затрет в памяти все предыдущие результаты калибровки.

Популярным модулем считается модуль GPS со встроенным компасом (в случае отсутствия компаса на основной плате, китайский аналог). Менее популярными являются датчик скорости воздушного потока (работает по принципу трубки пито) и сонар. Сонар в большей части используется на ардукоптерах при конструировании автономных беспилотных летательных аппаратов. Позволяет не сталкиваться с препядствиями при движении по заданному ранее маршруту.

Как только Вы подключили компас и поставили галочку разделе "Hardware Options", напротив него, необходимое произвести калибровку, которую можно сделать следующими способами:
- Первый способ - это ничего не делать. После подключения питания (в поле перед запуском) GPS модуль соединится со спутниками, но данные магнитного компаса будут автоматически откалиброваны только в полете, путем сравнения данным с электронного компаса и данных с GPS. Плюс в этом способе - ничего не нужно делать (только запастись терпением). Минус в том, что каждый первый запуск требует много времени.
- Второй способ - калибровка в ручную в Mission Planner (фото выше).
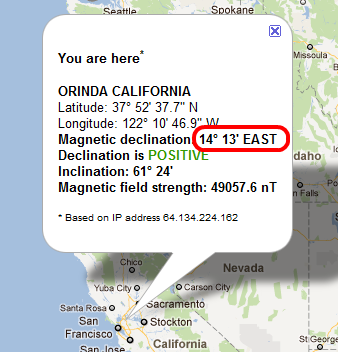 Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении.
Вводим значение Declination (Магнитное склонение). Переходим по ссылке Declination web site в Misson Planner в разделе Hardware Option. По инструкции выбираете Ваше место расположения и как показано на фото с права обведенное красным и есть значение Declination (значение магнитного склонения), это значение необходимо ввести в Misson Planner в разделе Hardware Option затем нажать кнопку “Live Calibration” и начать вращать самолет с APM с установленным модулем компаса (или встроенным). Вращение во все 360 градусов, а так же вокруг своей оси необходимо производить в течении 30 секунд пока система собирает данные и осуществляет калибровку. Плюс такого способа калибровки в том, что отсутствуют любые электромагнитные наводки т.к. электродвигатель не работает, т.е. калибровка занимает всего 30 секунд. Минус такой калибровки исключительно в том, что если самолет очень больших размеров придется изрядно по мучаться при его вращении. - Третий способ самый необычный - это калибровка компаса при помощи полетного лог файла последнего полета (или записанного ранее) с установленными GPS и компас модулем (без какой либо калибровки). Функция отмечена как Log Calibration, воспроизводит полет из log (.tlog) и система сопоставляя анализирует записанные данные GPS и гироскопа (IMU) осуществляет требуемые корректировки. Это самый удобный способ калибровки компаса. Минус в том, что если загрузить .tlog , где полет фактически не совершался (например только вращение корпуса модели), то калибровка будет полностью сбита.
Настройки режимов полета производится в разделе Configuration -> Fight Modes
- Одна из удобных функций ардупилота - это возможность переключения режимов полета в процессе самого полета. Представьте, что с земли Вы можете включить/выключить режим стабилизации, включить ркжим "Возврат домой".
- Переключать режимы полета APM возможно не только через передатчик, но и через компьютер в случае если у Вас установлен модуль радио модема (xbee)
- Переключение через передатчик осуществляется путем настройки переключателя (например 3х позиционного или тумблера шасси и д.р.) на канал 5. 5й канал передатчика подключается в 8й вход ардупилота т.к. для режима "Самолет" именно 8й используется для данных о режиме полета. The goal is to send a PWM signal — for each desired flight mode — that falls somewhere near the middle of one of the flight mode ranges, shown on the right.
- Настроив передатчик на нужный переключатель (тумблер) выбранный режим будет отображаться зеленым выделением. На каждый режим полета (Fight Mode 1 - 6) можно выбрать требуемую функцию из выпадающего меню. Выбрав функции полета под каждый режим не забудьте сохранить нажав зеленую кнопку Save Modes.

Внимание: до того как Вы перейдете к конфигурированию (настройке) APM, убедитесь, что Приемник и передатчик сопряжены и функционируют корректно.
Далее подключите APM2 через USB порт к персональному компьютеру.
Здесь бывает популярная проблема с питанием полетного контроллера - нехватка питания, так, что подключайте USB кабель напрямую в компьютер без usb-хабов. Не используйте кабель свыше 3х метров.
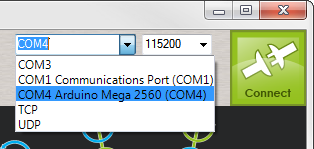
После подключения и запуска Mission planner убедитесь, что COM порт выбран с меткой Arduino Mega 2560, а скорость порта выбрана 115200, далее можно нажимать кнопку Connect для соединения (происходит соединение через протокол MAVLink).
Внимание: Если это первое подключение APM, то после запуска Mission Planner будет выполнена автоматическая процедура подготовки к первому запуску, которая включает в себя форматирование встроенной памяти APM, соответственно сброс всех настроек в первоначальный вид. Данная процедура занимает 1 - 2 минуты, в это время нажатие кнопки Connect будет выдавать ошибку о невозможности соединиться.
]]>
Будет идеально если Вы уже летали на самолете до установки APM2.5 т.е. модель от тримирована. Хотя это достаточно легко сделать во время первого запуска, в ручном (manual mode) режиме.
Далее включаем передатчик и убеждаемся, что аппаратура настроена на режим "самолет" (в случае если ваша модель - самолет, для планера выберите режим планера).
В Mission Planner, во вкладке Configuration, нажимаем “Calibrate Radio”. Передвигая ручки управления видим отклонения до максимального предела. Красные полоски показывают максимальные отклонения (в плюс или минус). Канал Ch 5 используется APM для переключения режимов.
Внимание: если при движении ручками на передатчике Вы не видите результата на экране монитора попробуйте нажать на кнопку “Calibrate Radio” еще раз, а также убедитесь в правильности соединения APM, питания, приемника и mini-usb кабеля, варианты подключения следующие:
- Питание ардупилота через Power module, в 3-й канал входа АРМ(input) подключите приемник, на приемнике так же в 3й канал, JP1 разомкнут
- Питание от USB: в 3-й канал входа АРМ(input) подключите приемник, на приемнике так же (проводок) в 3й канал, JP1 замкнут. Питание на приемник будет поступать от USB, просто включите передатчик.
В “Calibrate Radio” Вы можете включить/выключить реверс, включить функцию элевонов. Не забудьте нажать “Click when done” или Save для сохранения результатов.
