Установка самая обычная:
в процессе установки будет установлен драйвер необходимый для обмена данными с платой APM, соглашайтесь с установкой не подписанного драйвера

После установки ПО Mission Planner подсоедините APM к USB порту micro USB шнура

Откройте Mission Planner
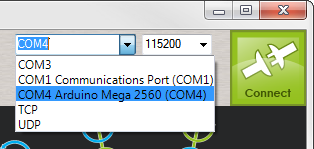 Здесь выберите нужный COM порт, необязательно он будет COM4 (нумерация определяется операционной системой) главное что надпись Arduino Mega 2560 говорит о том, что на этом COM порту подключен Ваш APM.
Здесь выберите нужный COM порт, необязательно он будет COM4 (нумерация определяется операционной системой) главное что надпись Arduino Mega 2560 говорит о том, что на этом COM порту подключен Ваш APM.
Не спешите нажимать кнопку Connect с начало необходимо загрузить прошивку.
Перейдите в раздел HARDWARE -> Install Firmware, где и выбираем иконку нужного нам летательного (или не летательного) аппарата:
Если у Вас уже имеются ранее установленные прошивки нажав Ctrl-O появится выпадающий список, позволяющий загрузить более ранние версии.
Если Вы устанавливаете полетный контроллер на мультироторный летательный аппарат (дрон) необходимо выбрать тип рамы в разделе Initial setup -> Mandatory Hardware -> Frame Type:
